低空经济是国家战略性新兴产业,是新域新质生产力的典型代表。继“大陆世纪”“航海时代”“太空探索”等地理空间开发之后,低空正成为人类活动的新空间。2024年全国两会首次把“低空经济”写入政府工作报告,意味着低空经济这一新兴产业被提升至国家战略层面。
低空经济是以低空飞行活动为核心,以无人驾驶飞行、低空智联网等技术组成的新质生产力与空域、市场等要素相互作用,带动低空基础设施、低空飞行器制造、低空运营服务和低空飞行保障等领域发展的综合性经济形态。自主飞行器是低空经济运行的主要载体,随着自主飞行器技术与低空应用场景的深度融合,自主飞行器有望广泛应用于物流配送、城市治理、智慧农业、应急救援等领域。该文重点围绕低空经济中自主飞行器关键技术问题,包括自主飞行器构形、能源管理、感知与定位、高效通信、任务规划、协同控制与安全管理以及空域规划等问题,进行深入剖析。并结合实际发展情况,详细分析了自主飞行器技术的发展趋势。
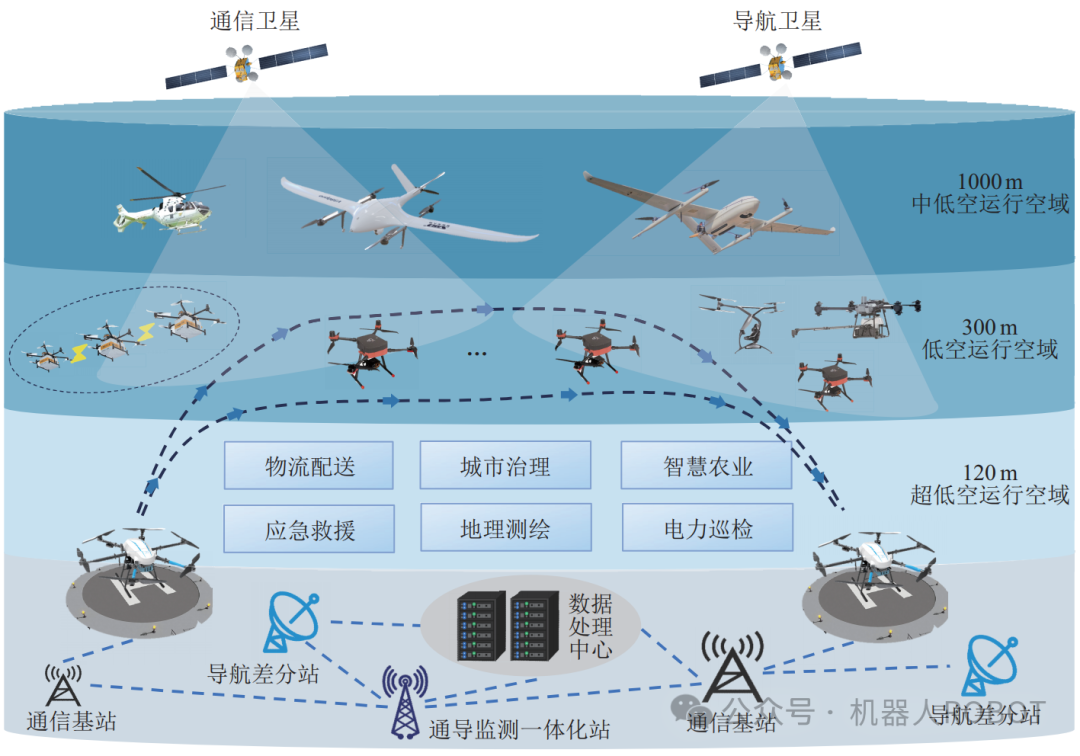
图1 低空飞行运行概念图
一、自主飞行器关键技术
低空经济的发展离不开技术的支撑。通过不断研发新技术,如适配低空任务的飞行器构形、飞行器能源管理方案、多模态环境感知、实时安全高效通信、智能规划调度、协同控制等,可以显著提升自主飞行器的性能,拓展其应用范围,并满足多场景任务的需求。而“感-通-算-控”一体化技术是解决飞行器规模化安全飞行的核心关键技术,它将环境感知、高效通信、智能规划决策与协同控制等核心技术紧密结合在一起,保障低空飞行系统的安全、高效运行,促进低空经济的产业生态完善与可持续发展。

图2 “感-通-算-控”一体化技术
1 自主飞行器构形
为了有效提升自主飞行器的智能性、功能性以及安全性,国内外研究人员首先将研究重点放在自主飞行器构形设计上。本节结合低空经济典型场景需求,重点分析固定翼、旋翼、扑翼三类主流飞行器构形。

图3 代表性固定翼飞行器

图4 代表性旋翼飞行器
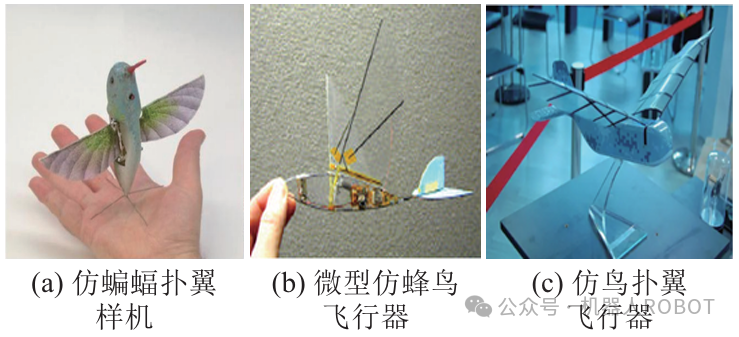
图5 代表性扑翼飞行器
1.2 自主飞行器能源管理
自主飞行器的能源管理是一个复杂而关键的技术领域,它涉及到飞行器的续航能力、效率、环保性能以及经济性。自主飞行器的能源管理策略是确保飞行器高效、安全完成任务的关键。飞行器的能源通常是有限的,如何合理管理和优化能源的使用,直接影响到飞行器的续航能力、任务执行能力和安全性。
1.3 实时安全高效通信
通信在低空经济中至关重要,尤其体现在无人机编队的协同操作、数据回传、远程控制和信息安全等方面。在多无人机协作任务中,实时高效的通信是确保任务完成的基础。无人机编队需要依赖低延迟通信来完成分布式任务,如灾害救援、环境监测。在低空经济中的云边端通信技术方面,随着边缘计算、云计算和智联网技术的迅猛发展,飞行器集群的数据处理和智能决策能力得到了显著提升。云边端协同架构通过将计算任务分配到靠近数据源的边缘节点,降低了数据传输延迟,提高了系统的实时响应能力。此外,网络切片被广泛应用于飞行器集群的通信系统,通过创建多种专用虚拟网络来满足不同类型的流量需求,从而在同一物理网络上并行支持多个业务。这种技术结合了5G的高带宽和低延迟特性,使飞行器能够在复杂的场景中更加高效地完成任务。
1.4 多模态自主感知与高精度定位
多模态传感器融合通过将摄像头、激光雷达、毫米波雷达和惯性测量单元(IMU)等多种传感器结合使用,可以提供更全面、稳定的环境感知信息,为飞行器典型场景中的自主导航和智能避障提供强有力的技术支持,从而保障其在物流、巡检和城市运营中的高效性和可靠性。

图6 常用感知传感器类型
1.5 任务规划和路径规划技术
随着无人机技术的快速发展,低空经济已成为全球关注的重要领域,涵盖物流配送、农业监控、城市基础设施巡检及灾害响应等应用场景。低空经济的核心在于构建高效、安全的多无人机系统,以支持动态、复杂环境下的任务执行,其典型特征包括任务高密度、环境复杂性、资源受限性及实时性要求。在此背景下,任务规划与路径规划作为多无人机协作的关键技术,具有重要的研究价值。
表1 任务规划算法对比
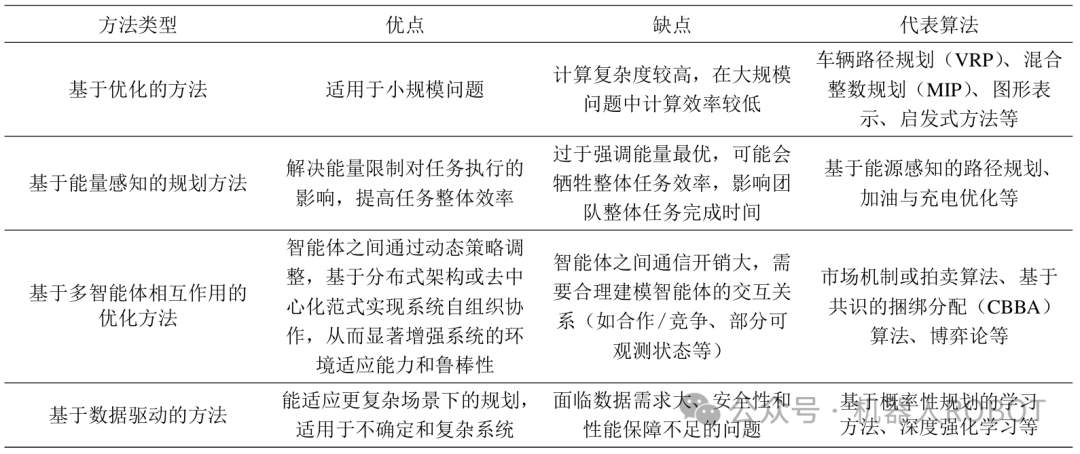
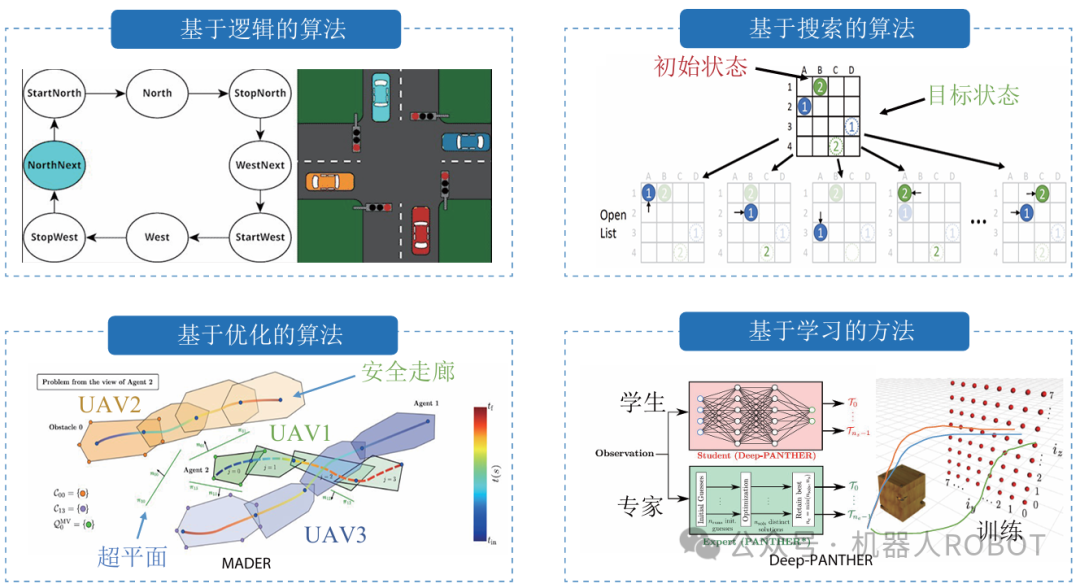
图7 路径规划
1.6 自主飞行器协同控制与健康管理技术
为了满足大规模自主飞行器集群的协同控制需要,避免集群内部发生任务、时间以及空间等层面的冲突,设计科学、高效的编队控制方法保障自主飞行器在低空领域飞行安全是十分重要的。编队控制的目的是在考虑飞行器自身动态特性以及环境约束的前提下为编队生成控制信号,以便完成既定的任务。飞行器集群编队控制方法有多种,按照其通信拓扑结构不同,主要分为集中式、分散式和分布式3种。从协同控制方法采用的结构、算法、模型和发展历程来分类,协同控制又分为传统协同控制方法和智能协同控制方法。
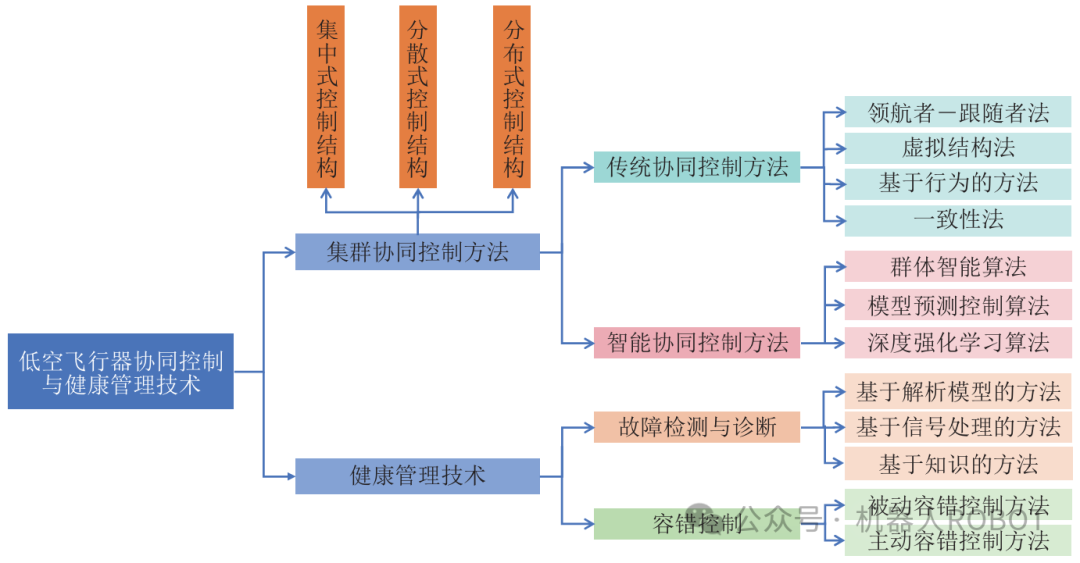
图8 自主飞行器集群协同控制与安全管理方法分类
1.7 低空空域规划与安全管控技术
低空空域规划是伴随现代航空技术迅速发展而兴起的关键研究领域,主要任务是科学管理低空空域资源。自主飞行器种类的日益多样化以及数量增加使得空域资源冲突风险加剧。合理划分空域并制定科学的管理规则,有助于减少飞行冲突和事故发生的可能性。在城市人口密集区,科学的低空空域规划不仅保护了地面人员和设施,还维护了空中交通的流畅性。自主飞行器安全管控技术是指保障飞行器在全生命周期安全性的技术手段与措施。
二、自主飞行器技术的发展趋势
随着国家政策的逐步放开和基础设施的不断完善,低空经济将迎来前所未有的发展机遇,而自主飞行器技术也会得到飞速发展,其未来发展将体现在以下几个方面。
(1) 新型自主飞行器设计:自主飞行器是未来规模化和常态化低空飞行的载体,是低空航行系统服务保障和功能交互的主体。随着人工智能、先进传感、智能控制、新材料、新动力等技术的不断进步,飞行器正在向着高度集成化、轻量化、小型化、低能耗、多功能等方向发展,并将推动飞行监管服务模式的不断变革。
(2) 更高层次的低空智联网技术:低空智联网解决方案可能会融合当前4G/5G网络与专用通信链路/网络、“通-感”一体化网络和低轨卫星互联网,加强低空网络信号和低空感知监视能力,形成一张覆盖低空领域的网络,为自主飞行器的高效运行提供实时、可靠、安全的通信方案。
(3) 更安全的低空飞控系统:飞控系统对于自主飞行器至关重要,它不仅决定了飞行性能,还直接关系到飞行安全。稳定高效的飞控系统可确保飞行器在复杂动态环境下的安全可靠飞行,并保障任务执行的高效性。
(4) 更高效的多源传感器融合算法:低空经济的多源传感器融合技术将在边缘计算、自适应融合、多模态感知和高容错四大关键特点的引领下持续发展。
(5) 更智能化的航路调度规划方法。随着低空空域日益拥挤,未来的航路调度系统将采用多目标优化算法,考虑飞行时间、能耗和安全性等因素,实现资源的最优配置,减少空域冲突并提升作业效率。
(6) 更智能化的地面管控系统:随着低空经济的快速扩张,地面管控体系正面临多维度技术迭代与机制重构。
(7) 无人机与大模型的深度融合。人工智能领域的最新突破,尤其是以 ChatGPT、SORA、Kosmos-2、GATO和MobileViT为代表的基础模型,以及AIGC(人工智能生成内容)技术的快速发展,正在深刻重构各行业生态。通过将大模型与无人机系统深度融合,可显著提升其自主智能水平。
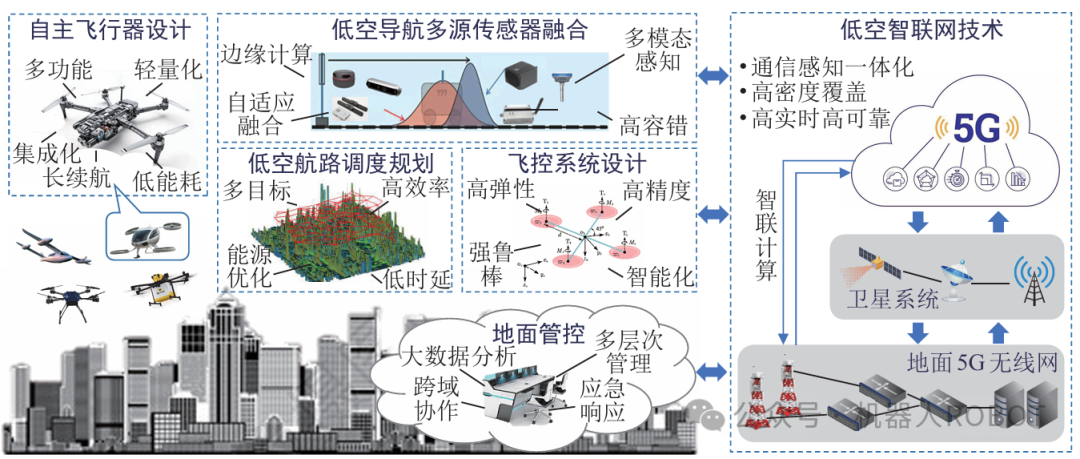
图9 自主飞行器技术的发展趋势
三、依托团队
湖南大学机器人视觉感知与控制技术国家工程研究中心始终面向世界科技前沿、经济主战场、国家重大需求和人民生命健康,开创机器人视觉感知与控制基础理论体系,突破关键核心技术,研制核心零部件,推动机器人系统产业化应用。经过多年的建设,工程研究中心拥有一支由王耀南院士领衔有重要国际影响力的创新团队,形成了机器人多模态感知、机器人高性能控制、机器人集群协同规划、机器人灵巧机构作业、机器人系统技术与应用五个稳定的技术方向。团队围绕我国国防安全和智能战场重大需求,依托机器人视觉感知与控制技术国家工程研究中心,开展智能自主无人系统空天信息感知、集群协同决策控制、人机混合智能指控、多域融合系统集成等领域的研究,攻克制约智能自主无人系统应用的多项关键技术难题,面向高复杂、强对抗、高实时的军事场景开展应用,有力支撑我国科技强军战略。
湖南大学电气与信息工程学院博士后陈林为第一作者,湖南大学王耀南教授、缪志强教授为论文通信作者。本文得到了国家自然科学基金项目的支持。

图10 机器人视觉感知与控制技术国家工程研究中心
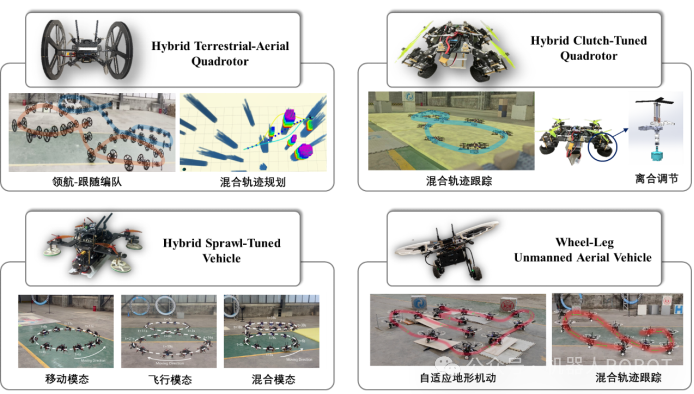
图11 团队设计的陆空多模态飞行器
欢迎引用:
陈林, 缪志强, 王祥科, 陈谋, 段海滨, 王耀南. 自主飞行器技术及其在低空经济中的应用综述[J]. 机器人, 2025, 47(3): 470-496.
来源:机器人ROBOT